Motion Planning for Autonomous vehicles in Dynamic Environments
Motion Planning for Autonomous vehicles in Dynamic Environments
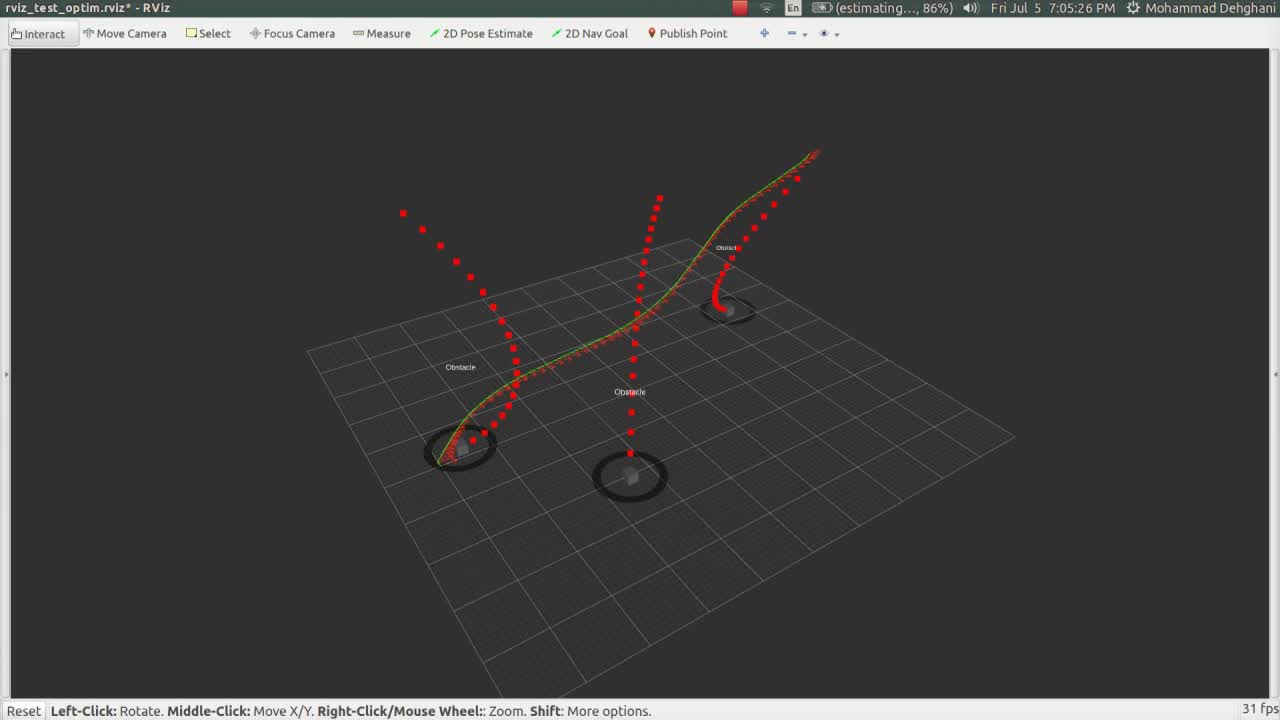
Designed a hierarchical motion planner (Global + Local) for autonomous vehicles operating in dynamic, obstacle-rich environments.
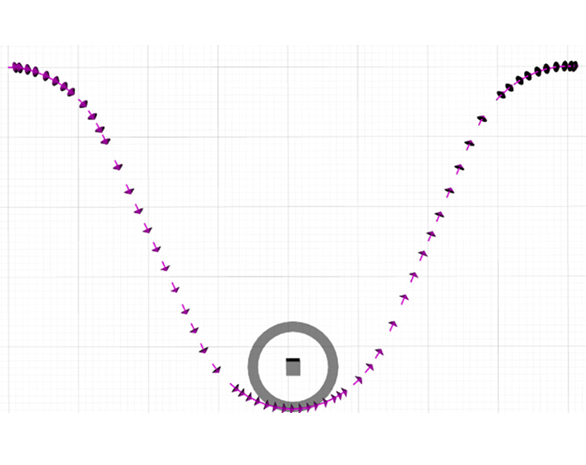
Analyzed and benchmarked various global and local planning algorithms, selecting and optimizing Timed Elastic Bands (TEB) to achieve safe and smooth trajectories in dynamic environments.
Developed a novel Trajectory Density optimization technique, significantly increasing computational efficiency and enabling real-time planning on resource-constrained embedded platforms.
[Published in Scientific Computing and Bioinformatics, Springer, 2025]